Mandjet is an Autonomous Surface Vehicle (ASV) developed for the RoboBoat 2026 competition. The vehicle was redesigned to improve stability, maneuverability, and autonomous task execution TDR.
Vehicle Overview
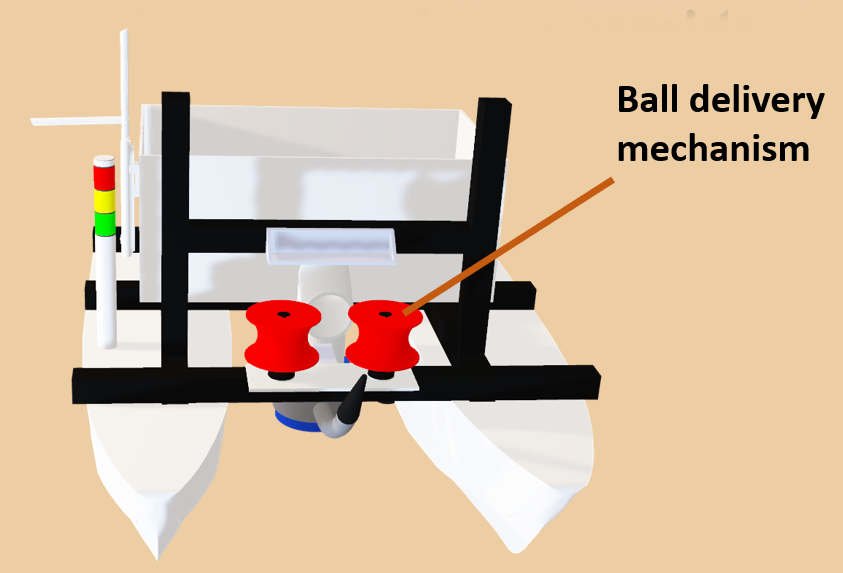
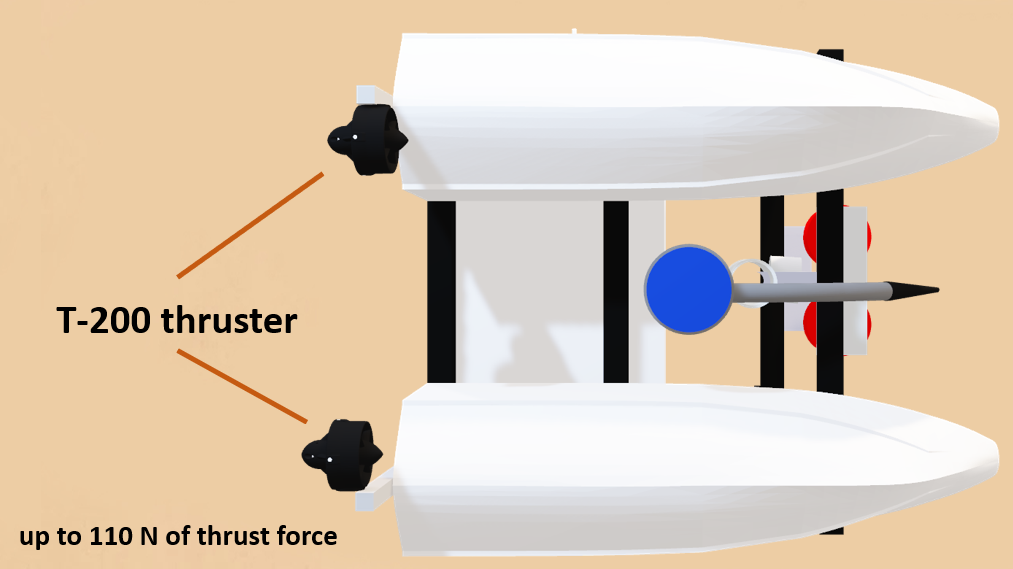
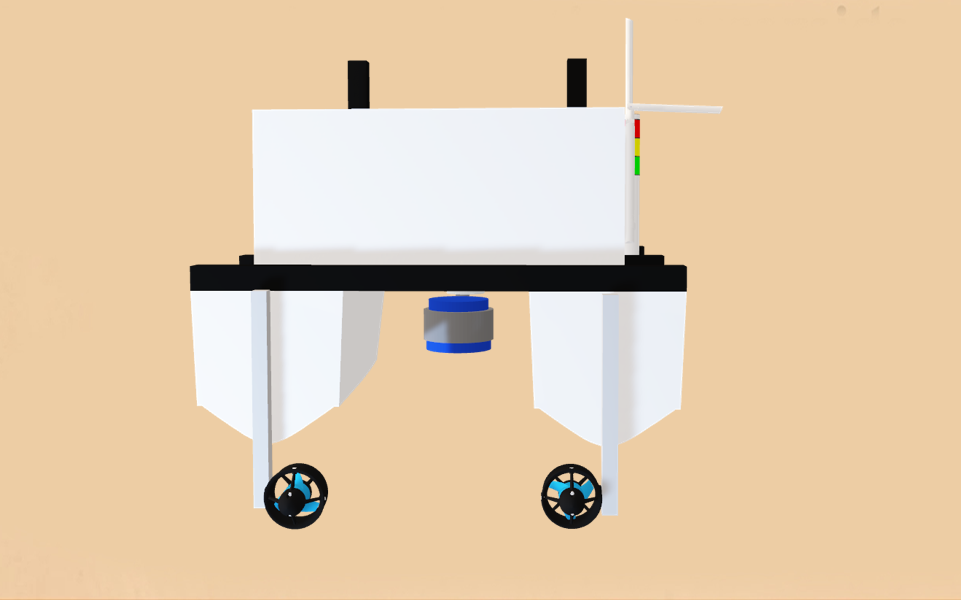
 Figure 1: Mandjet ASV – General View
Figure 1: Mandjet ASV – General View



.png)